TI-Tintin-OPT8241二次开发和应用系列--Hardware Level
TI-Tintin-OPT8241二次开发和应用系列–Hardware Level
1.TI-Tintin-TOF-solution 系统介绍
OPT8241 Evaluation Module,是TI提供的一个TOF深度相机的开发板,如下图所示:
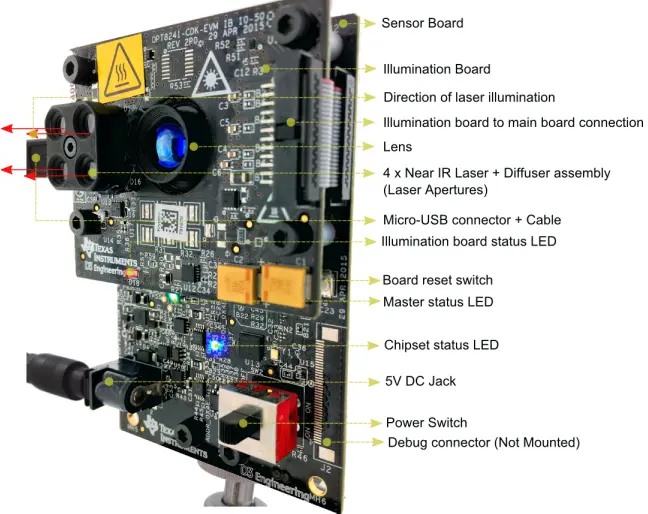
这个开发板基本开源了全部内容,硬件电路原理图、PCB图,软件提供了SDK,但是一部分还是保密的。
根据“TI-Tintin-OPT8241二次开发和应用系列–Theory Level” 介绍,一个TOF深度相机系统,必须包括几个部分,主动光发射模块,接收模块。整个开发板分两层,上面一层是IB(illumination board) ,下面一层是SB(sensor board) 。IB(illumination board) 就是主动光发射模块;SB(sensor board)就是接收模块。
2.开发板硬件结构框架
构成开发板的主要芯片由这么几个组成,OPT8241,OPT9221,发射红外模块,如下图所示:
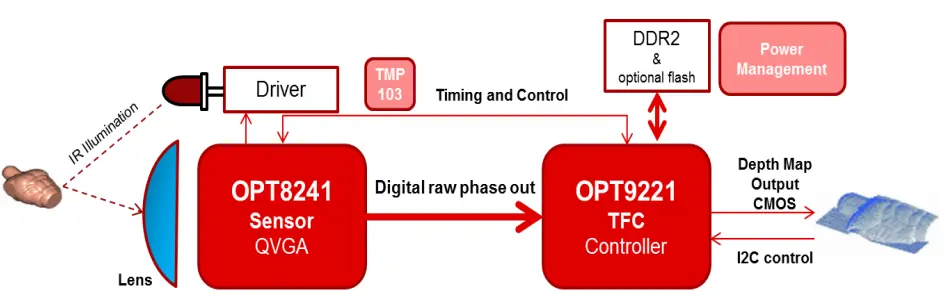
OPT82:控制光源发射+反射光接受与处理,作为传感器
OPT92:接收脉冲与处理,得到深度数据,作为处理器
红外发射模块:作为OPT82驱动的主动光设备
更加详细的
更加详细的硬件结构关系如下图:
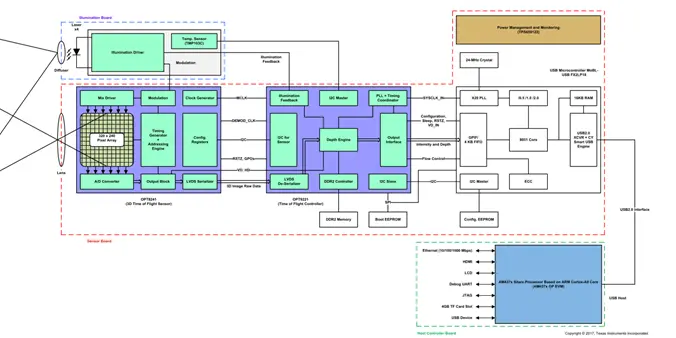
图中,主要有三个虚线框,蓝色的表示IB ,红色的表示SB ,绿色的表示上位机部分;
可以看到IB中主要的是发射模块和温度传感器。开发板采用laser LED ; 一些其他公司的产品会采用VCSEL。
在SB中,主要展示了 OPT8241与OPT9221还有接口芯片(USB FX2LP18)内部的功能模块,还有三者的关系。
关系
对比“TI-Tintin-OPT8241二次开发和应用系列–Theory Level(2/3)”中的相机系统一般组成结构,对应关系如下:
OPT8241–作为传感器的角色
OPT9221–作为处理器的角色
USB FX2LP18–作为接口芯片的角色
绿色框–作为上位机的角色
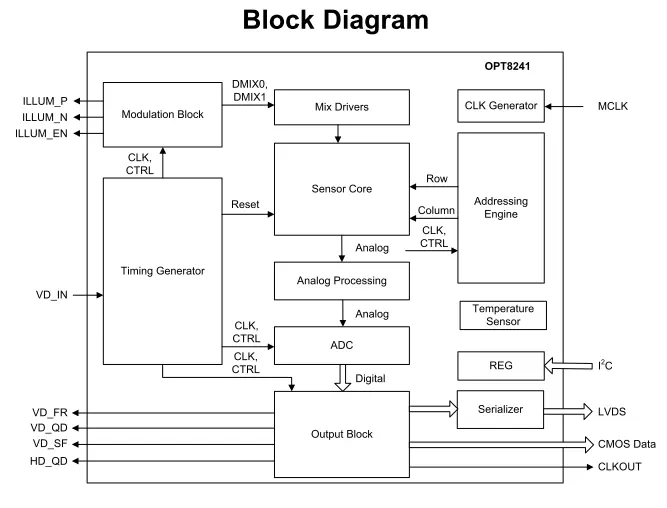
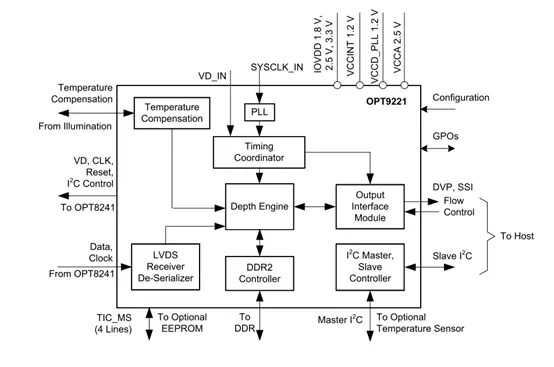
一个主要的数据流向,在上图中已经用了双实线的方向箭头表示了。首先是光进入OPT82传感器中的感光区域(Pixel Array)-> AD Converter->Output Block -> LVDS seriallizer -> 数据传输到OPT92的LVDS De-seriallizer ->Depth Engine -> Output interface ->USB接口芯片的FIFO ->最后传输给上位机。
IB 与OPT82的关系: OPT82需要给Driver 发送调制脉冲,并且接收反射回来红外脉冲波并转化为数字信号;
IB 与OPT92的关系:IB中的温度传感器的温度数据给与OPT92,之后OPT92 计算一个温度补偿,并反馈给IB中的红外发射Driver。因为driver持续工作会产生明显的温度变化,如果不对这个温度变化导致的测量准确度漂移进行补偿,那将是一场灾难;
OPT82与OPT92的关系:OPT92一方面需要接收OPT82从感光传感器得到的数据(代表物体反射的红外光),另一方面,OPT92需要知道OPT82调制的脉冲波的频率是多少(代表主动光发射的频率)。这样,OPT92得到了主动光数据与反射光数据,才能在OPT92中的Depth Engine中计算相位差,得到被测物体的距离;
OPT92与接口芯片的关系:OPT92出来的数据需要存放在接口芯片中的FIFO中,组合队列成一副图像的帧数据,并且按照USB接口通信协议的方式把数据传输给上位机;
电路原理图构成如下,符合上图的硬件结构框图:

放大的OPT8241与OPT9221芯片的内部功能图:
关于开发板更加详细的介绍,请参照 :http://www.ti.com/tool/TIDA-01173
交流QQ: 365334601