TI-Tintin-OPT8241二次开发和应用系列--Software Level
TI-Tintin-OPT8241二次开发和应用系列–Software Level
1.了解 VOXEL SDK 软件工程框架
详情参考:https://github.com/3dtof/voxelsdk/wiki/Voxel-SDK-Architecture
主要的三个模块
Voxel Libraries
主要作用是,一个处理对不同的深度相机系统获取的深度数据的上位机程序(有点拗口)包括数据交换、下载和上传,深度数据处理与现实等等。简而言之,这部分就是处理深度数据的上位机程序。TI主要是对自己生产的不同深度相机开发板定制的一个软件库。例如tintinOPT8241,OPT8320、haddockCamera、CalculusCamera等等深度相机。
Configuration Files 主要作用是,文件中包含了深度相机系统的参数信息,深度相机链接上位机的时候,可以读取这个文件,让深度相机可以获取合适的参数配置。其中包括相机肚子的参数,相机共有的内参外参等标定系数等。
Firmware Files 主要作用是,Firmware(固件)是烧写在深度相机开发板芯片上的文件。就像智能手机,它有它自己的固件。固件类似于,将程序编写好之后下载到单片机上,而这里的程序就是固件,往往这部分功能是作为系统的驱动层。不过,非常遗憾的是,除了1,2部分,这部分TI他们是不开源的。
了解 Voxel Libraries 架构
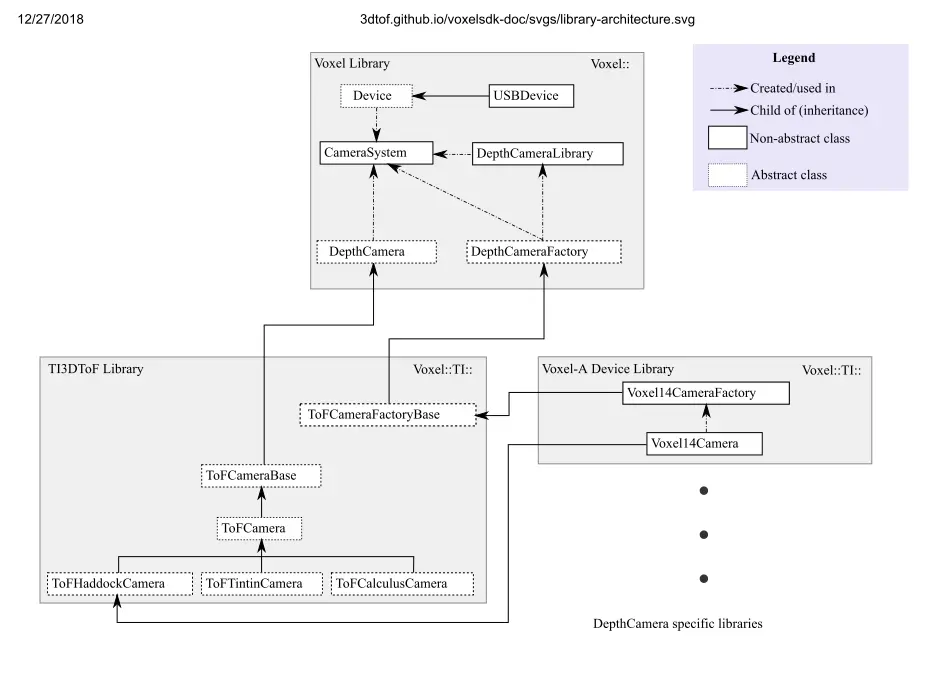
如上图所示,Voxel Libraries 主要有两个库组成:Voxel library、TI3DToF library,封装为libvoxel.so on Linux; libti3dtof.so on Linux 。 他们各自都有自己的namespace, Voxel:: 与 Voxel::TI:: ,TI3DToF library 继承 Voxel library 。
实线箭头表示继承关系;虚线箭头表示引用或者使用关系;虚框表示的是抽象类;实框表示的是实体类。抽象类只能被继承不能实体化,实体类可以继承也可以实体化。
因为文章的目的侧重是做应用开发,所以关于Voxel Libraries介绍,我讲个大概。
在Voxel library中,CameraSystem 是最主要的,许多其他类都要依赖他。主要作用是相机(不一定指深度相机)一些通用的参数配置。在这个基础上才会有DepthCamera类等一系列的深度相机设置。
继承Voxel library的TI3DToF library更加有针对性,虽然可以看到这个TI3DToF library里的类都是抽象类,没有实体类,但是这部分都是作为TI一系列DepthCamera所用的抽象公共类,将来要被具体tintinDepthCamera-CDK实体类继承。
关于Voxle Device Library 看到在这个Voxel Libraries构架图中,你会发现没有tintinDepthCamera-CDK的继承框图,这个图上没有画出它的继承关系。实际上,TintinCamera–OPT8241继承的是TOFtintinCamera与TOFCameraFactoryBase。
2.了解&安装 VOXEL SDK
安装教程详见:https://github.com/3dtof/voxelsdk/wiki#installation Linux or Windows ,建议选择linux - ubuntu 14.04 作为开发环境,因为后续一些应用只能在linux上展开。
下载 SDK Open-Source 包含以下主要的文件夹
- Voxel - the Core Voxel-SDK library
- TI3DToF - For TI’s depth camera support
- VoxelPCL - For Voxel-PCL integration
- App - For VoxelCLI and other apps
- Test - For individual test programs
文件夹的名称和关系基本与之前所介绍的Voxel Libraries对应。其他的,VoxelPCL这个整合了PCL的一个应用,主要用于PCL的三维点云显示。APP文件夹中主要包含两个应用程序,SimpleVoxelViewer and Voxel CLI 。SimpleVoxelViewer只是一个PCL显示;而Voxel CLI 即可以显示还可以做其他交互操作。
关于Voxel CLI 详见:https://github.com/3dtof/voxelsdk/wiki/Voxel-CLI
关于文件夹Test
可能是做开发时、调试时,留下的单独测试程序,我运行测试过,但是没有链接成功过 :_( 。但基本不会影响我的后续应用开发。
以下所openSource 中所有的Test子程序:
3.如何获取 depth data
连接设备之后,以Voxel CLI方式,可以保存的数据有:
- RAW

- Phase

- Depth data

- Ambient

- Amplitude

- Flags

- PointCloud

- Vxl
以上数据类型,主要可以分成四类: 对应wiki中的pipeline 详见: https://github.com/3dtof/voxelsdk/wiki/Voxel::DepthCamera
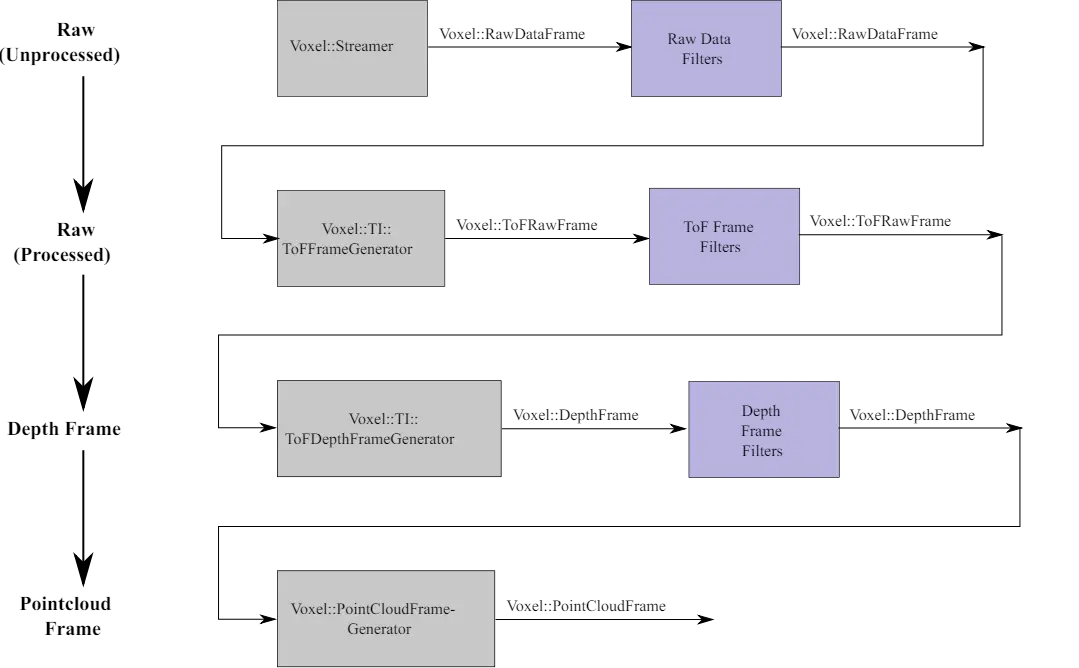
第一类 :Raw data
- RAW
- Phase
这里的Raw data 不管是有没有处理过的(processed)都是Raw data
第二类 :depthFrame
- Depth data
- Ambient
- Amplitude
- Flags
注意这里的depth data 不是depthFrame,一个 depthFrame 中包含以上4个数据类型信息。 depthFrame输出的数据格式已经向前在芯片资料中已经给出。
第三类 :PointCloudFrame
- PointCloud
PointCloud点云数据,包含xyzi等3D数据信息,是由depthFrame通过像素坐标系转换世界坐标系得到的。
第四类: 用户(TI)自定义类型
- Vxl
这部分是TI自定义数据类型,一个vxl的数据格式文件,里面可能同时包含depthFrame和PointCloudFrame。用户可以通过更改open source 程序得到自己想要的数据格式。
在open source 中的以下代码中可以更改
使用Tintin深度相机做应用,比较多用到的数据类型是depthFrame和PointCloudFrame,所以深刻认识这两个数据类型是应用开发的基础。在之后的内容中,会进一步介绍depthFrame和PointCloudFrame。
4.Depth data的认识与其应用
先来看一下,下图对于depth与PointCloud的定义:

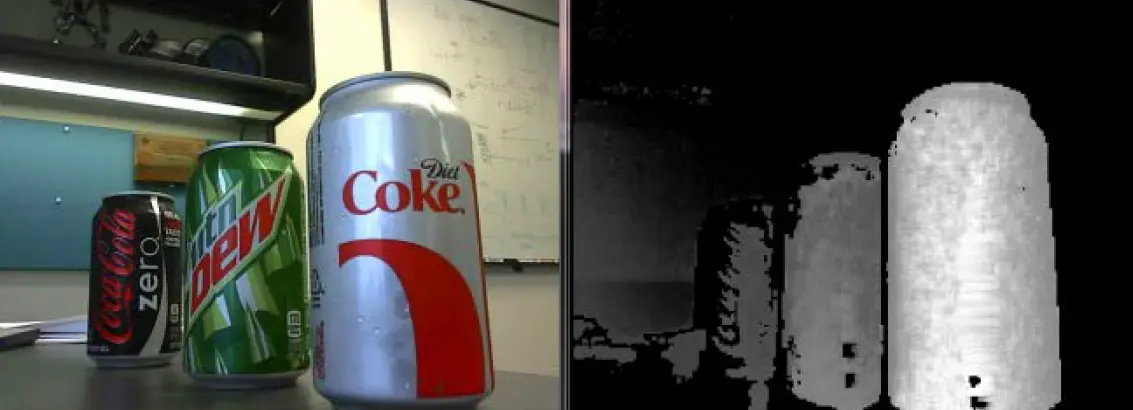
右边是RGB采集的图像,左边是深度相机采集的深度图,亮度越亮表示距离越近,越暗的表示距离越远。
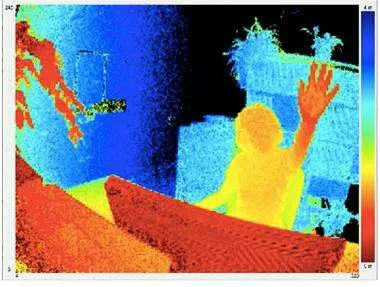
另外,深度图还可以被渲染成不同的RGB24颜色,颜色越暖越近,颜色越冷越远。 depth 表示的是相机与物体之间的距离,图示:
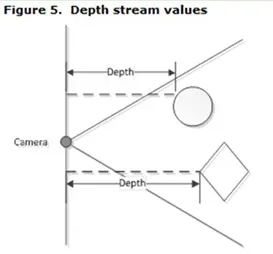
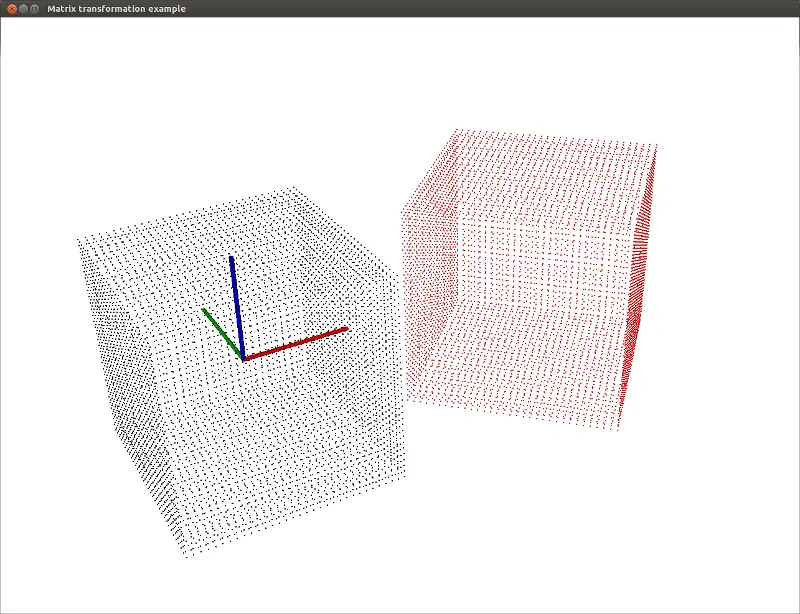
PointCloud 每个点包含xyz 信息,通常是由depth 数据得到,一个立体的图像是由无数多个点组成并呈现出来的。
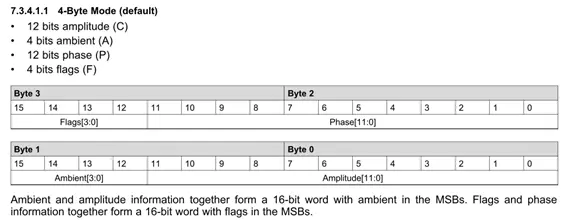
depthFrame 的数据格式,用文本打开使用CLI保存的Depth 数据,你会发现,四个字节之间会有一定规律,是符合芯片说明中的4-ByteMode。
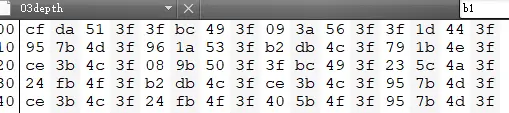
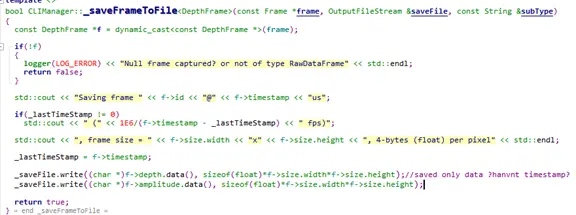
而且,在Open source 中也体现了,如图所示 :

所以说,每个DepthFrame其中包含了 amplitude 与 depth .
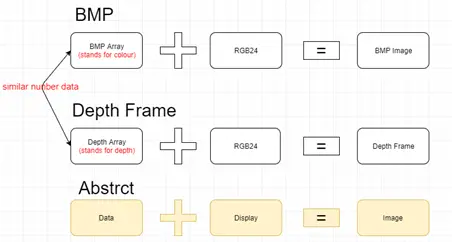
RGB Image 与 DepthFrame
RGB与Depth data本质区别—-RGB 像素的值代表颜色,depth data像素的值代表深度
RGB图片每个像素都有他自己的坐标,在一个像素坐标系表示,坐标分别用u,v 表示。每一点(u,v)的值表示该点的颜色,范围在0-255(RGB888)。一张有depth data构成的图片也适用于像素坐标系中,深度相机采集到的图像的坐标也是分别用u,v 表示,只不过每一点的值是相机与物体的距离,可以用(u,v,d)表示。同理,RGB图像每一点可以用(u,v,color)表示。
理解了RGB的数据格式,以及depth与RGB数据格式的区别之后,会发现他们的本质区别在于代表的含义不同。RGB与depth他们的数据都是相同的数字,只不过再通过一种规定的数据“格式”编码,并且用“工具”呈现出来罢了,其他两个是相同的,真正的不同在于代表的含义。可以用示意图表示:
(当时,我发现这点的时候,我想到了一个哲学范畴,每个人身上都具备相同“工具”——眼、耳、口、鼻、四肢等,但真正不同的是人的“数据含义”——思想,因为真正的思想不同,当用“工具”呈现时将是完全不同的意义,如果思想越先进,那么这个意义就越举足轻重。)
如何应用depth data做图像处理?
由于深度图像的(u,v,d)每个像素点表示物体与相机的距离,这里的d是一个float类型,打印输出的值就是距离,如下图所示:(某一点被检测物体的距离为:3.27979)。

因为深度图像上每一点上得到的信息是距离,所以在算法上我们可以将保留设置的距离范围内,滤除不必要的距离的物体。所以,处理深度图像相比RGB图像最大的优势在于,能够得到非常清晰的前后景分离的图像。
深度图像的算法处理
对于深度图像的算法处理,通常做法是: 1.前后景分离 2.转换成黑白图像 3.形态学处理 4.形状、形态分析 5.物体识别或跟踪
这里针对GITHUB上TI提供的“Demo-application–handTracking”程序作分析。
S1:前后景分离
1 | |
分析:DepthFrame *frm作为clipBackground()的传入参数,得到深度数据帧。函数功能是分离背景,如何分离背景?再看:

关键在于这里for循环,这个函数有两个输出参数,但是第二个当做输出。在这个循环中,遍历深度数据帧frm(一个深度数据帧包括depth&litude,所以这里写in.amplitude.sieze()也可以),条件是:如果frm中像素深度值小于depthClip(是一个阈值,可以设置为1.2等,ampClip同理,范围在0-1)并且amplitude大于阈值,那么保留该点的深度值,并且push到新创建的DepthFrame hand的depth数据中,否则该点设置为0;下一个语句条件是:符合条件的,push到DepthFrame hand的amplitude数据中为1,否则该点的amplitude设置为0;
S2:转化成黑白图像,深度数据可视化
1 | |
分析:分离前后景之后,就可以通过OpenCV库创建一个Mat矩阵操作与显示(这里创建的Mat以hand中的amplituede的数据,也可以用depth,可以写为hand.depth.data());如果后面加上 imshow(“Binary”, _binaryMat);imshow(“Contours”, drawing); 显示的就是非常分离清晰的前后景图像;相比RGB相机通过帧差法分离前后景效果要好很多的。
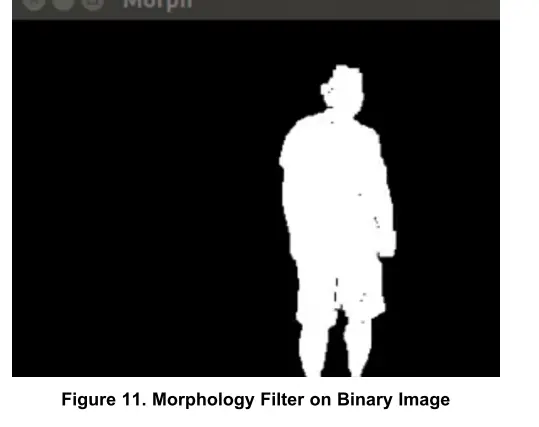
S3:形态学处理,形状分析,物体跟踪等应用
程序中的处理方式如下,自行分析:
1 | |
在得到物体清晰的轮廓之后,一些应用便非常容易展开,OpenCV拥有大量的应用处理例程可以付之于上。
handTracking程序连接:
https://github.com/3dtof/DemoApplications/tree/master/TinTin/hand_tracking
关于了解depthFrame的Q&A refrence
- https://blog.csdn.net/o_sun_o/article/details/8351037
- https://blog.csdn.net/mouse8166/article/details/6195047
- https://blog.csdn.net/leixiaohua1020/article/details/12682381
- https://docs.microsoft.com/en-us/sql/odbc/reference/develop-app/row-wise-binding?view=sql-server-2017
- https://e2e.ti.com/support/sensors/f/1023/t/666615?tisearch=e2e-sitesearch&keymatch=OPT8241 MATLAB
- http://e2e.ti.com/support/sensors/f/1023/p/721965/2703526#2703526
- http://e2e.ti.com/support/sensors/f/1023/t/730122?tisearch=e2e-sitesearch&keymatch=vxl
- https://www.ibm.com/support/knowledgecenter/en/SSEPEK_11.0.0/odbc/src/tpc/db2z_rowwisebind.html
- https://www.codeproject.com/Tips/819613/Kinect-Version-Depth-Frame-to-mat-File-Exporter
- https://social.msdn.microsoft.com/Forums/en-US/4da8c75e-9aad-4dc3-bd83-d77ab4cd2f82/common-nui-problems-and-faq?forum=kinectsdk
- https://social.msdn.microsoft.com/Forums/zh-TW/9aaa03b5-d2c1-46ed-80ad-b4d23882c136/depth-frame-data-format-and-ranges?forum=kinectsdk
交流QQ: 365334601