Structure From two views
Features
this project is modified from Chapter4_StructureFromMotion
non gpu version is better for beginner of learning CV . i.e. compile the project would be easy .
structure from two views
non opencv3_contrib verison
Fix bug in the project
original in Distance.h
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
| void OnlyMatchFeatures(int strategy = STRATEGY_USE_OPTICAL_FLOW + STRATEGY_USE_DENSE_OF + STRATEGY_USE_FEATURE_MATCH) {
imgpts1.clear(); imgpts2.clear(); fullpts1.clear(); fullpts2.clear();
std::vector<cv::Mat> imgs; imgs.push_back(left_im); imgs.push_back(right_im);
std::vector<std::vector<cv::KeyPoint> > imgpts; imgpts.push_back(imgpts1); imgpts.push_back(imgpts2);
RichFeatureMatcher rfm(imgs,imgpts);
rfm.MatchFeatures(0, 1);
imgpts1 = rfm.GetImagePoints(0);
imgpts2 = rfm.GetImagePoints(1);
features_matched = true;
}
void RecoverDepthFromImages() {
if(!features_matched)
OnlyMatchFeatures();
std::vector<cv::DMatch> matches;
FindCameraMatrices(K, Kinv, distortion_coeff, imgpts1, imgpts2, imgpts1_good, imgpts2_good, P, P1, matches, pointcloud
|
modified in Distance.h
- the variable matches is set as global in class Distance
- rfm.MatchFeatures(0, 1,&matches);
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| void OnlyMatchFeatures(int strategy = STRATEGY_USE_OPTICAL_FLOW + STRATEGY_USE_DENSE_OF + STRATEGY_USE_FEATURE_MATCH) {
imgpts1.clear(); imgpts2.clear(); fullpts1.clear(); fullpts2.clear();
std::vector<cv::Mat> imgs; imgs.push_back(left_im); imgs.push_back(right_im);
std::vector<std::vector<cv::KeyPoint> > imgpts; imgpts.push_back(imgpts1); imgpts.push_back(imgpts2);
RichFeatureMatcher rfm(imgs,imgpts);
rfm.MatchFeatures(0, 1,&matches);
imgpts1 = rfm.GetImagePoints(0);
imgpts2 = rfm.GetImagePoints(1);
features_matched = true;
}
|
Reasons
- function MatchFeatures() will update variable matches
- the correct algorithm order is function FindCameraMatrices() after get matches
- if the variable matches is empty ,there is no necessary to compute camera matrix
Parse SFM project
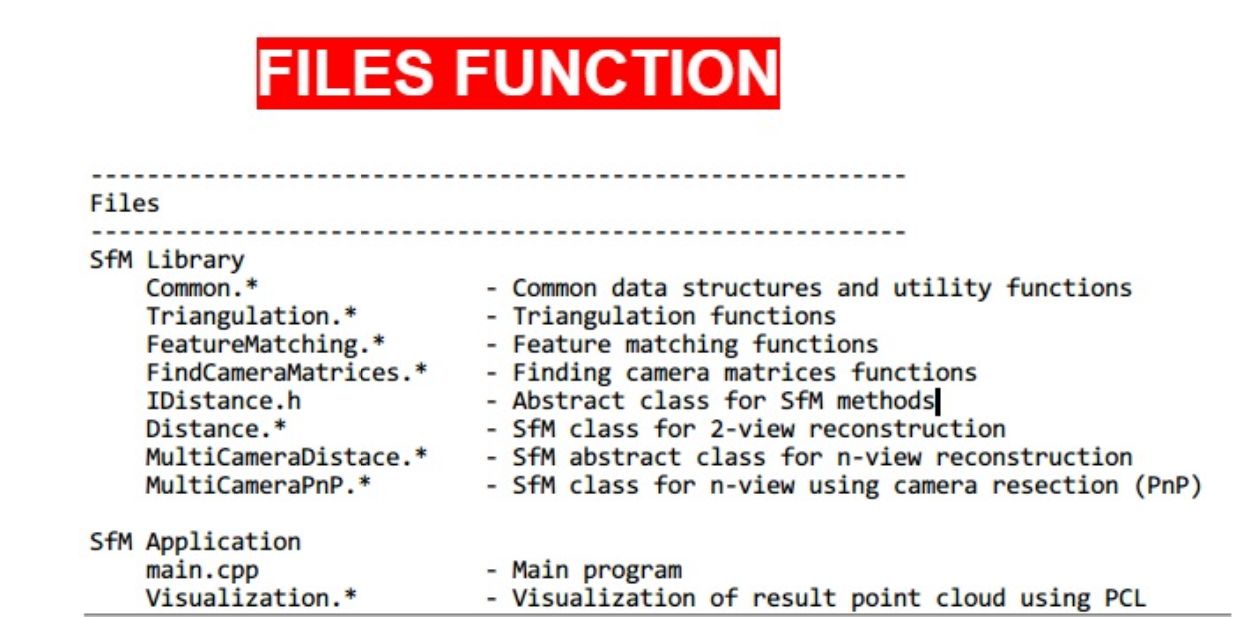
Files Function
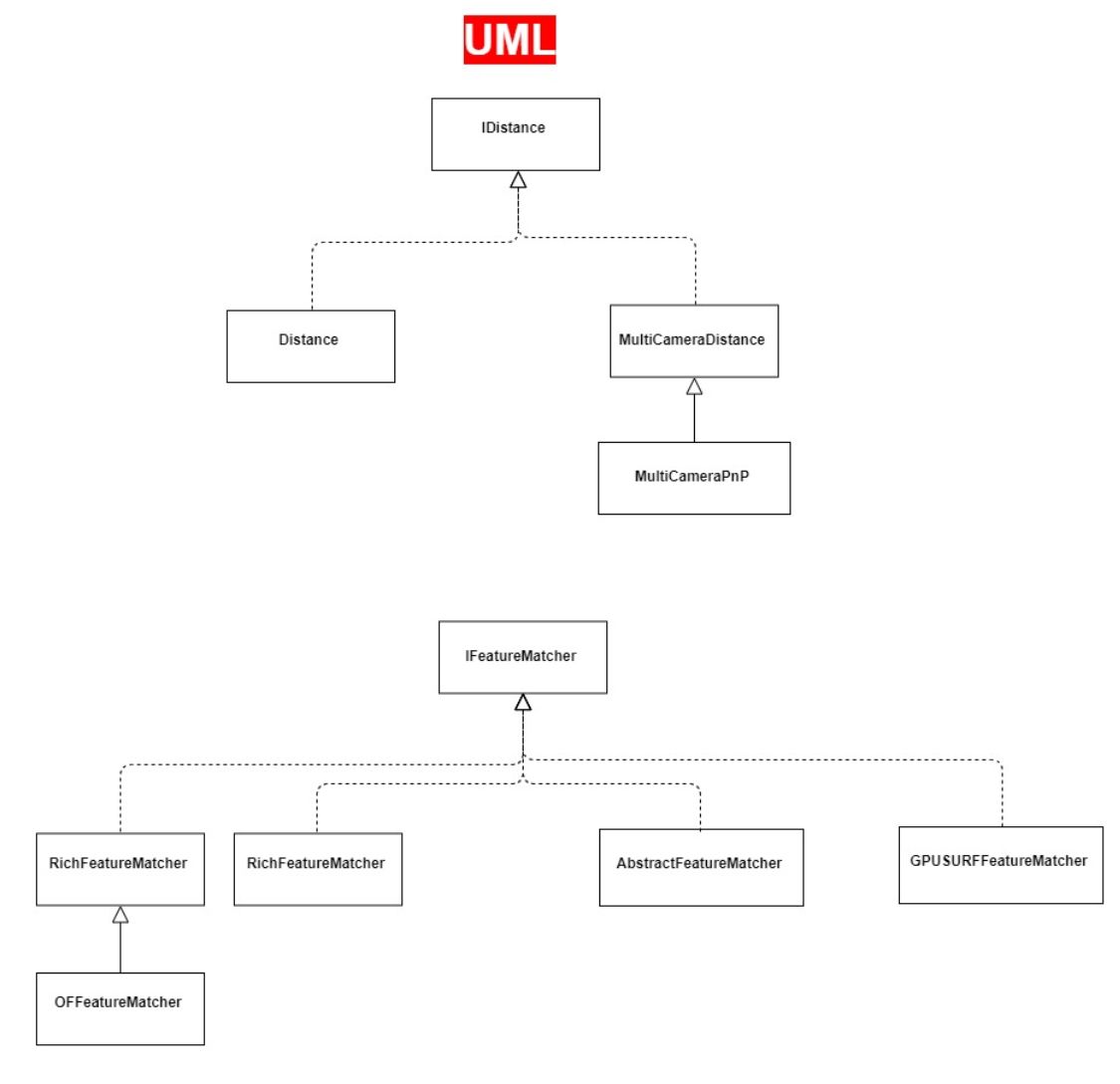
UML
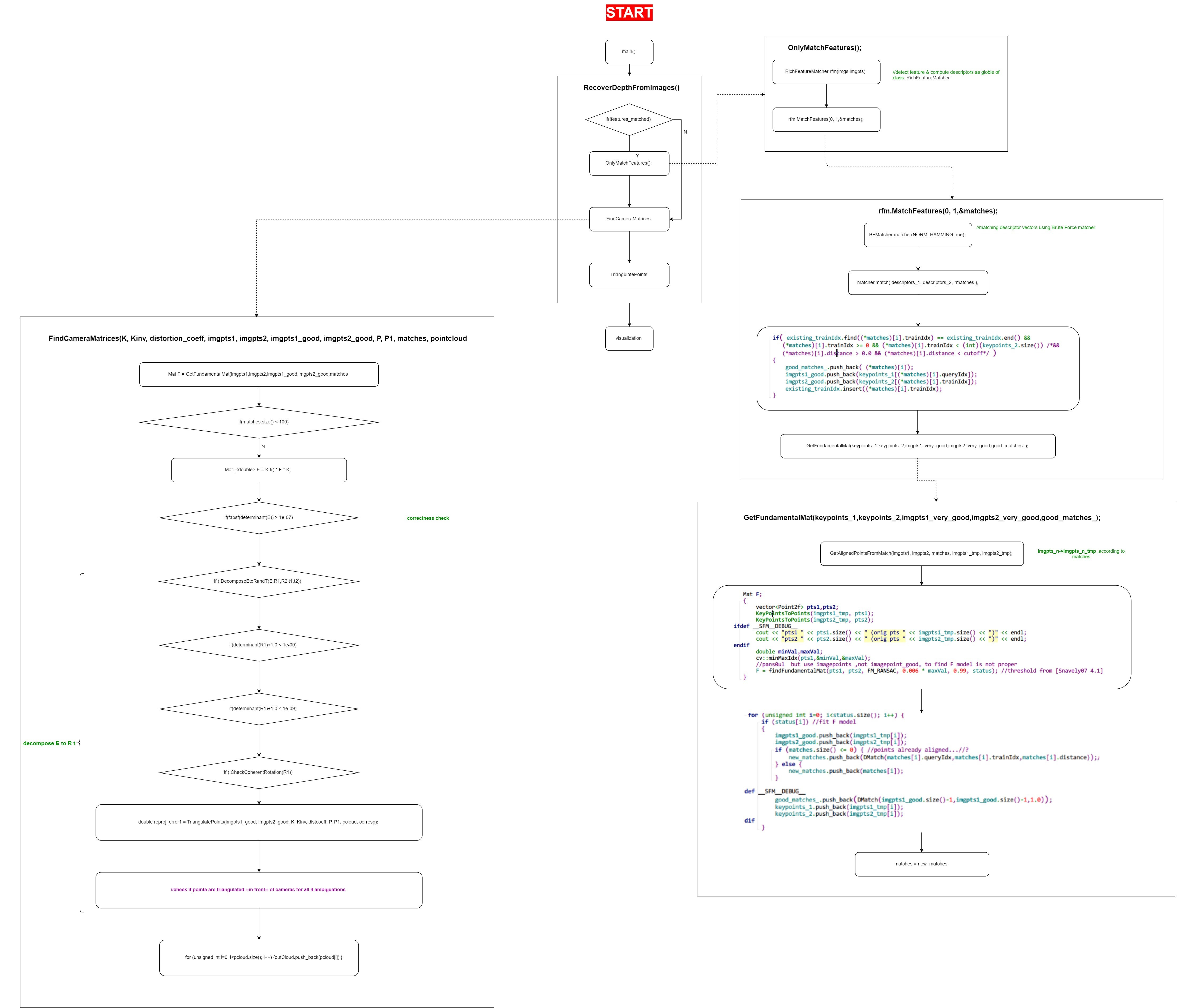
process diagram
Project repository
original–Chapter4_StructureFromMotion
this project